2. Stepper мотор
3. Драјвер за наш мотор
4. Извор напајања
5. Каблови
6. Канап
7. Кантица
Израда вежбе:
1. Осмишљавање шеме
Пре свега треба повезати мотор са контролером и драјвером а то се ради на следећи начин:
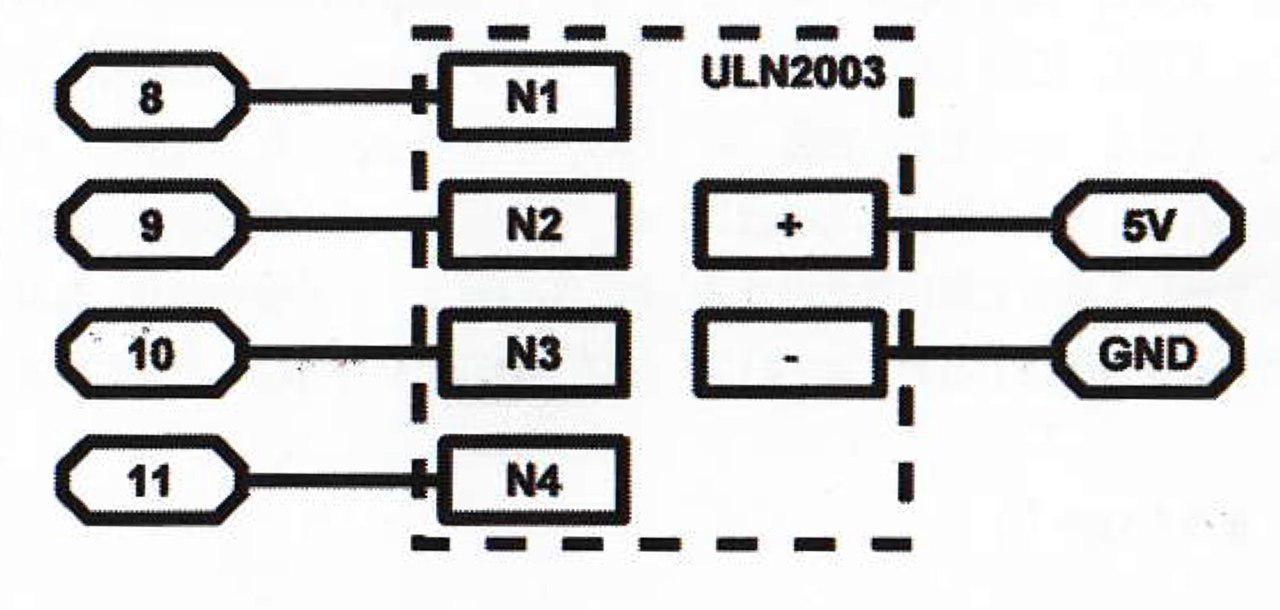
1. Пинове драјвера треба повезати са пиновима на Arduinu (од 8ог до 11ог) као што је приказано на слици
2. Повежие мотор са драјвером
3. У нашем случају препоручује се да извор буде батерија. Прикључите плус и минус батерије на драјвер као што је приказано на слици. Минус батерије спојите са земљом Arduina
4. Укључите микроконтролер
Ако сте то завршили завезите кантицу за ужеи њега спојте са мотором као што је приказано на слици

2. Писање скеча
У нашем задатку најважнији фактор је схватити колико корака треба да изврши мотор да би се кантица подигла.
Узмимо да је w дужина нашег ужета. Ако знамо да се обим круга израчунава по формули:

где је R полупречник осовине на коју се намотава уже нама је једино потребно израчунати

и добићемо број кругова
Један круг има 360 степени, а како смо пре закључили да је за пун окрет нашег мотора потребно 2048 корака, то значи да за N кругова треба да се изврши следећи број корака

Па тако добијамо следеће:
Steps = 2048 * w/2piR
А сада напишимо код
#define STEPS_MOTOR 32
Stepper stepper(STEPS_MOTOR, 8, 10, 9, 11);
void setup()
{
stepper.setSpeed(500);// задајемо брзину
}
void loop()
{
stepper.step(3100); //Задајемо да се изврши 3100 корака
delay(1500); //Пауза од 1.5 секунде која је потребна да се кантица подигне
stepper.step(-3100);//Задајемо да се изврши 3100 корака у супротну страну
delay(1500); //Пауза од 1.5 секунде која је потребна да се кантица спусти
}
На крају се добија следеће: