Подключение к WiFi с использованием микроконтроллера ESP8266 NodeMCU
Цель работы
Научиться подключаться к WiFi сети с микроконтроллера Arduino и передавать данные по WiFi.
Задачи работы
- Добавить поддержку микроконтроллера NodeMCU на базе WiFi-модуля ESP8266
- Разработать скетч для подключения к WiFi сети и передачи данных по беспроводному каналу связи.
Инструменты для выполения работы
- Компьютер с подключением к сети Internet
- Микроконтроллер NodeMCU V3 на базе EPS8266-12E
Теоретическая часть
Плата NodeMCU построена на базе модуля WiFi ESP8266.

Распиновка платы:
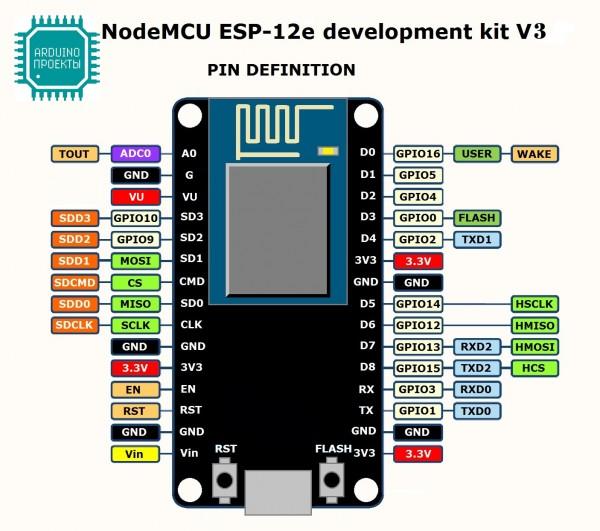
Для работы с этой платой была добавлена поддержка среды разработки Arduino IDE. Практически все библиотеки для обычной Arduino так же работают и для этой платы, однако ее распиновка отличается от распиновки плат Arduino. Так, на плате есть один аналоговый вход (A0), на котором работает 10-битный АЦП. Цифровым пинам 0-15 Arduino соответствуют выходы, обозначенные GPIO1-GPIO16. Например, если в Arduino IDE используется пин 12, ему будет соответствовать контакт, обозначенный на плате как D6 (GPIO12). Пины GPIO1 — GPIO5, GPIO10, GPIO12-GPIO15 поддерживают ШИМ.
Характеристики платы:
поддержка WiFi протоколов 802.11 b/g/n
Wi-Fi Direct (P2P), soft-AP
встроенный стек TCP/IP
SDIO 2.0, SPI, UART
встроенный PLL, регуляторы, и система управления питанием
Номинальное напряжение: 3,3 В
Входное напряжение: 3,7–20 В
Максимальный потребляемый ток: 220 мА
D9, D10 — UART
D1, D2 — I²C (D1 - SCL(SCK), D2 - SDA)
D5–D8 — SPI
Выполнение работы
Добавление поддержки микроконтроллера NodeMCU на базе WiFi-модуля ESP8266
Для добавления поддержки NodeMCU в среду Arduino IDE нужно выполнить следующие шаги:
- Открываем настройки (Файл -> Настройки)
- Находим дополнительные ссылки для менеджера плат и нажимаем справа кнопку редактирования (выделена на скриншоте)
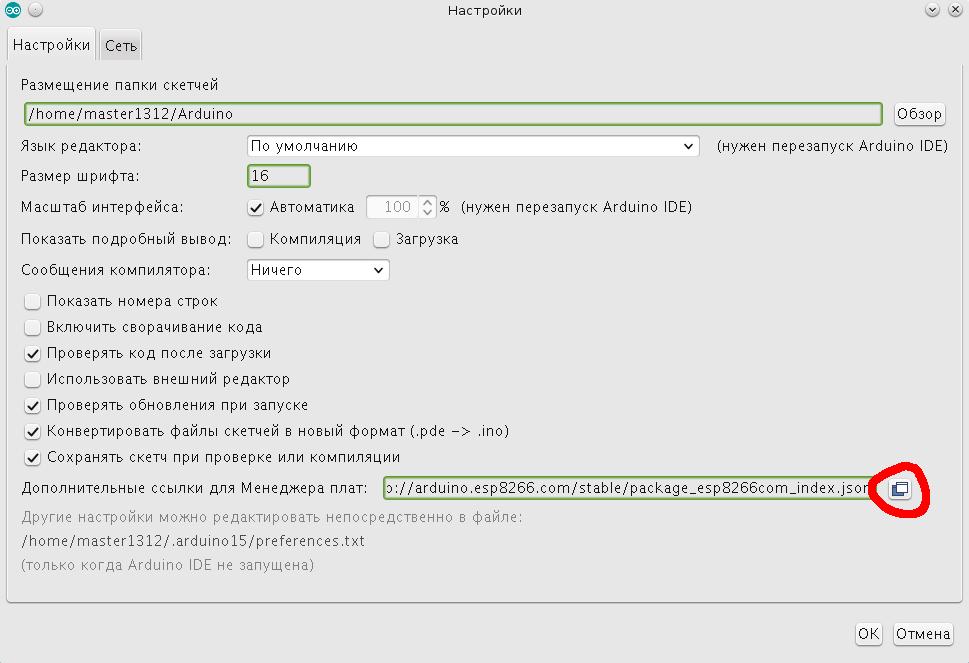
- Добавляем URL: http://arduino.esp8266.com/stable/package_esp8266com_index.json
- Сохраняем и заходим в менеджер плат (Инструменты -> Плата: -> Менеджер плат)
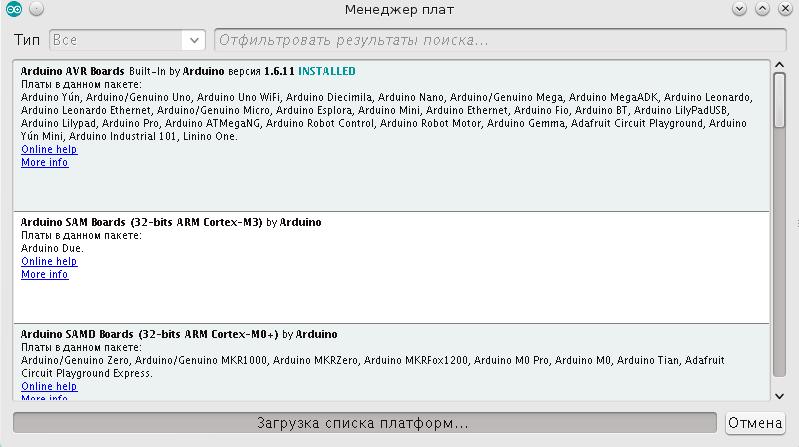
- Вводим в поиск "esp8266" и устанавливаем пакет esp8266
- Создаем новый скетч и сохраняем его как Esp8266Test.
- Выбираем плату "NodeMCU 1.0 (ESP-12E Module)" (Инструменты -> Плата:). Ниже в меню "Инструменты" вводим настройки для CPU Frequency, Flash Size и Upload Speed как показано на скриншоте (скорее всего, будут стоять именно такие, если плата отличается от изображенной выше, настройки могут отличаться).
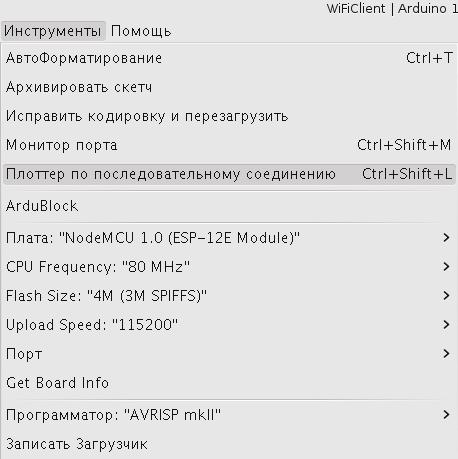
- Выбираем нужный порт.
Разработка скетча для подключения к WiFi сети и передачи данных по беспроводному каналу связи.
Скетч для работы с WiFi используем библиотеки, аналогичные стандартной библиотеке WiFi для обычных Arduino. При работе с обычной Arduino и каким-либо WiFi шилдом будут подключаться аналогичные заголовочные файлы, только без префикса "ESP8266".
Подключаем заголовочные файлы
#include <ESP8266WiFi.h>
#include <ESP8266HTTPClient.h>
Указываем параметры WiFi сети
const char *essid="WIFI_ESSID";
const char *key="WIFI_KEY";
WIFI_ESSID и WIFI_KEY заменяем на имя и пароль используемой WiFi сети.
В функции setup() запускаем Serial и подключаемся к WiFi
Serial.begin(9600);
WiFi.begin(essid,key);
while(WiFi.status() != WL_CONNECTED)
{
delay(500);
Serial.print(".");
}
Serial.println("WiFi connected");
В функции loop выполняем GET запрос на WEB-страницу удаленного сервера. Для этого подключаемся к серверу
WiFiClient client;
if(!client.connect("wl.unn.ru",80))
{
Serial.println("connection failed");
return;
}
Отправляем сгенерированный вручную GET запрос
client.print("GET /laboratory/?page=1 HTTP/1.1\r\nConnection: close\r\n\r\n");
Ждем ответа от сервера
unsigned long timeout = millis();
while(client.available()==0)
{
if(millis()-timeout>5000)
{
Serial.println(">>> Client Timeout !");
client.stop();
return;
}
}
Выводим ответ и спим 10 секунд
while(client.available())
{
String line=client.readStringUntil('\r');
Serial.print(line);
}
delay(10000);
Загружаем скетч на плату и открываем менеджер порта. Там раз в десять секунд должен появляться код веб-страницы, пришедший в ответ от сервера wl.unn.ru.
| |
#include <ARpc.h>
#include <ARpcBase.h>
#include <ARpcSrvReady.h>
const char *deviceName="led_blink_test";//имя устройства
const char *deviceId="{9c7ea7a4-5276-476a-914c-e95736ee304e}";//идентификатор устройства
int ledPin=13;//пин светодиода
unsigned long blinksCount=0;//число миганий
const char *interfaceStr="<controls><group title=\"Device controls\"><control sync=\"0\" title=\"Blink\" command=\"blink\"/></group></controls>";
//для получения данных с устройства необходимо подготовить описание датчиков
const char *sensorsDef="<sensors>"
"<sensor name=\"blinks_count\" type=\"single\"/>"//датчик blinks_count
"<sensor name=\"sin_x\" type=\"single\"><constraints dims=\"2\"/></sensor>"//датчик sin_x (двумерный)
"</sensors>";
//Определяем функцию обработки команд, передаваемых устройству.
//Библиотека будет вызывать эту функцию, когда на устройство будут
//приходить команды, например, введенные нами в мониторе порта.
//Эта функция принимает команду, аргументы команды, количество аргументов
//и указатель на объект класса ARpc, от которого пришла команда
void processCommand(const char *cmd,const char *args[],int argsCount,ARpc *parser)
{
if(strcmp(cmd,"blink")==0)//проверяем, что cmd == "blink"
{
//мигаем
digitalWrite(13,HIGH);
delay(200);
digitalWrite(13,LOW);
delay(200);
++blinksCount;
//генерируем "измерение"
parser->writeMeasurement("blinks_count",String(blinksCount).c_str());
//сообщаем библиотеке что команда обработана
parser->writeOk();
}
else parser->writeErr("Unknown cmd");//неизвестная команда
}
//Определяем функцию для передачи сообщений к ПК через последовательный пор
void arpcWriteCallback(const char *str)
{
Serial.print(str);
}
//объявляем объект класса ARpc и передаем ему ссылки на созданные
//выше переменные и функции
ARpc parser(300,&processCommand,&arpcWriteCallback,deviceId,deviceName);
int t=0;
void writeSinVal()
{
String sinVal;
sinVal+=String(sin(0.1*t));
sinVal+="|";
sinVal+=String(cos(0.1*t));
parser.writeMeasurement("sin_x",sinVal.c_str());
++t;
}
//Проихводим инициальзацию пина и последовательного порта в функции setup()
//и установить описание датчиков и интерфейса управления
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
pinMode(13,OUTPUT);
parser.setControlsInterface(interfaceStr);
parser.setSensorsDescription(sensorsDef);
}
//необходимо проверять последовательный порт на наличие новых данных, передавать их объекту parser, сгенерировать новый отсчет sin, после чего сделать
//задержку на пол-секунды, чтобы отсчеты не генерировались слишком часто
void loop() {
// put your main code here, to run repeatedly:
while(Serial.available())
parser.putChar(Serial.read());
writeSinVal();
delay(500);
}
|