Циљ вежбе:
Научити како се користи серво мотор Задаци вежбе:
1. Прављење шеме
2. Писање скеча Инструменти које ћемо користити у вежби:
1. Контролер
2. Серво мотор
3. Каблови Израда вежбе:
1. Прављење шеме
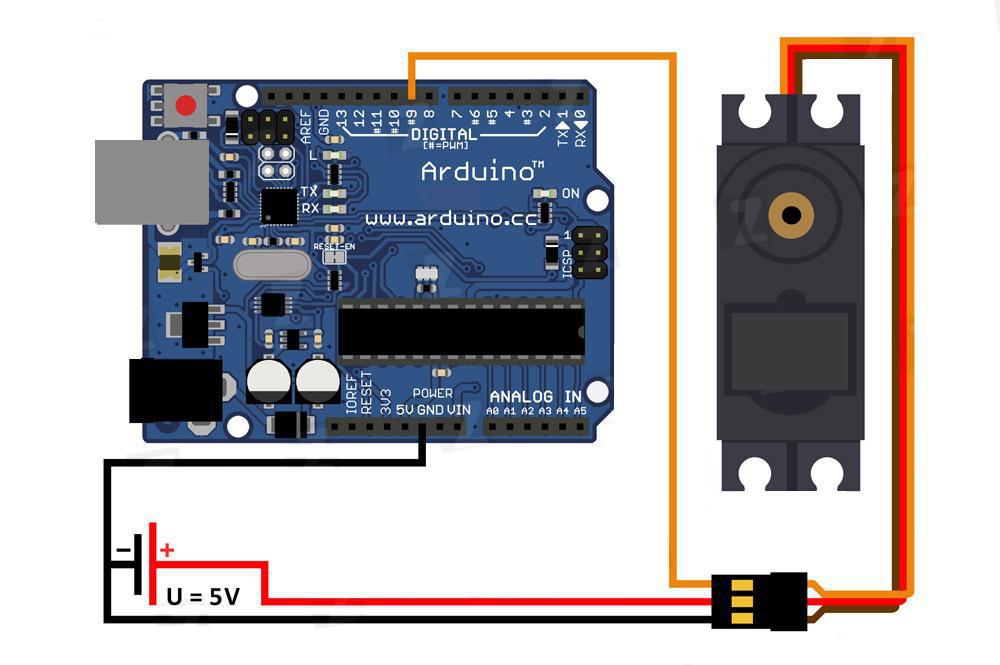
Шема треба да вам изгледа овако:
Пратите следеће кораке:
1. Наранџасту жицу мотора повежите на девети пин контролера
2. Црну жицу морота повежите са земљом
3. Црвену жицу повежите са 5 волти на контролеру
4. Укључите контролер
Ако имате неких проблема са спајањем погледајте следећи видео:
2. Писање скеча
Сада напишимо скеч:
#include <Servo.h> //Укључујемо библиотекуServo.h
Servo servoPrivod; //Креирамо објекат типа Servo како бисмо радили са серво мотором
int grad = 0; //Угао обрта серво мотора
void setup()
{
servoPrivod.attach(9); //Повезујемо серво мотор на девети пин
}
void loop()
{
servoPrivod.write(0);// Угао обрта је 0
delay(2000);// Чекамо 2 секунде
servoPrivod.write(90);// Угао обрта је 90
delay(2000);// Чекамо 2 секунде
servoPrivod.write(180); // Угао обрта је 180
delay(2000);// Чекамо 2 секунде
servoPrivod.write(0);// Угао обрта је 0
delay(2000);// Чекамо 2 секунде
servoPrivod.writeMicroseconds(1500); // Дефинишемо трајање импулса који управља
grad = servoPrivod.read(); //Очитавамо вредност угла односно позицију у којој се налази серво мотор
for(int i = grad; i > 0; i -= 1)
{ //Цикл од grad до 0 степени који се умањује за 1
servoPrivod.write(i); //Предајемо вредност угла серво мотору
delay(100); //Пауза од 0,1 секунде
}
delay(1000); //Пауза од 1 секунде
}
Детаљнији опис можете пронаћи у следећем видеу:
Можда ће вам затребати следеће команде:
myservo.attached(); //Проверавамо да ли је повезан серво мотор. Враћа логичку вредност bool.