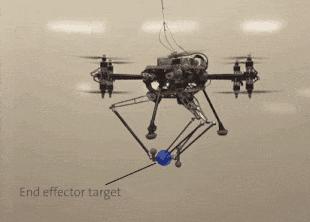
Швейцарские инженеры дополнили разработанный ими ранее всенаправленный дрон дельта-манипулятором и научили их работать вместе так, чтобы конец манипулятора всегда оставался на одном месте независимо от положения дрона и внешних воздействий. Статья о разработке опубликована в IEEE Robotics and Automation Letters.