Получить опыт сборки электрических элементов в схему и её подключения к микроконтроллеру Arduino. Научиться подключать стандартные библиотеки Arduino IDE. Научиться управлять подключенной схемой в среде программирования Arduino IDE на примере электрической схемы с сервомотором.
Используйте данные ресурсы по мере требования при подготовки к работе или её выполнении.
Описание схемы:
Необходимые материалы:
Возьмите все необходимые материалы. Удобно расположите плату беспаячного монтажа и микроконтроллер. Аккуратно, без сильных нажимов, во избежании поломки материалов, подсоедините каждый элемент как показано на схеме. Отрегулируйте резисторы чувствительности и задержки в среднее положение. Внимательно проверьте правильно ли подключены элементы, проверьте полярность элементов, посмотрите заземлены ли цепь.
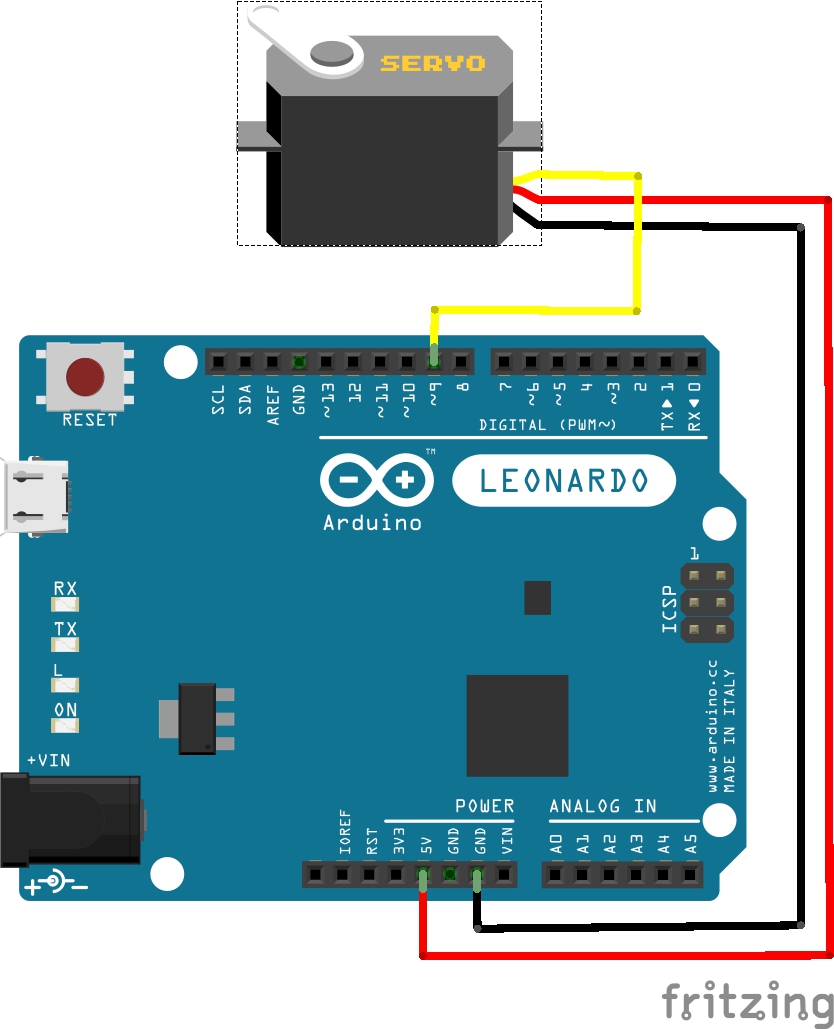
Схема лабораторной установки:
Макетная плата:
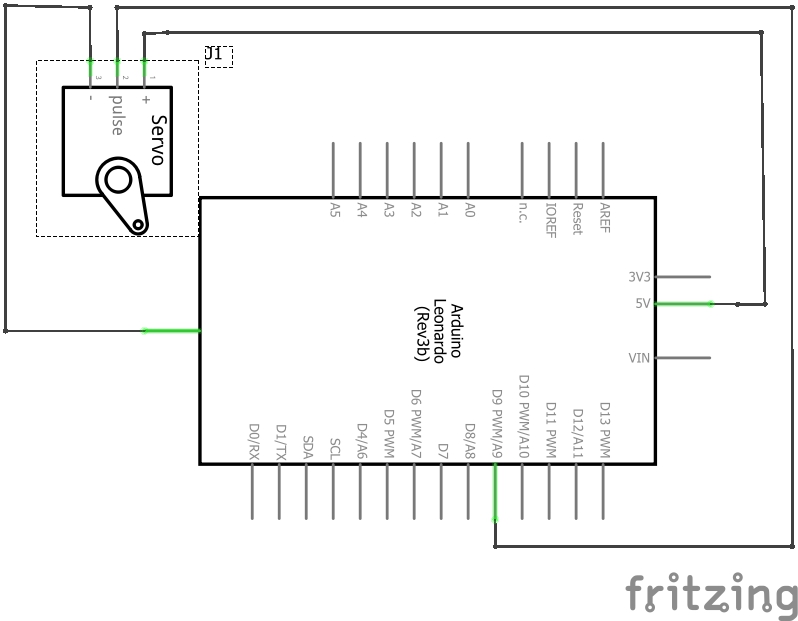
Принципиальная схема:
Задание на программирование лабораторной установки: напишите программу, которая будет, менять угол поворота реле от 0 до 180, с шагом 90 градусов, после 180 остановится на 90 градусах и далее с шагом 1 градус, вернется в 0.
Алгоритм написания программы:
Фото/видео отчет по выполненному заданию:
Программный код:
#include <Servo.h> //Подключение библиотеки Servo.h
Servo servoPrivod; //Создаем объект типа Servo для работы с сервоприводом
int grad = 0; //Угол поворота сервопривода
void setup()
{
servoPrivod.attach(9); //Подключаем сервопривод к пину 9
}
void loop() {
servoPrivod.write(0);
delay(2000);
servoPrivod.write(90);
delay(2000);
servoPrivod.write(180);
delay(2000);
servoPrivod.write(90);
delay(2000);
/*servoPrivod.write(0);
delay(2000);
servoPrivod.writeMicroseconds(1500);
grad = servoPrivod.read();
for(int i = grad; i > 0; i -= 1)
{
servoPrivod.write(i);
delay(100);
}
delay(1000);
}
Творческое задание: напишите программу которая будет с помощью кнопки менять угол поворота сервопривода от 0 до 180 за 6 равномерных шагов. Далее когда идет сброс на 0 градусов, при сбросе подается сигнал от пьезоэлемента.
Замечания к лабораторной работе:
Заключение: Я выполнил лабораторную работу, в которой познакомился с теоретическими стороной сервопривода и способами его управления. Так же познакомился и научился использовать новую стандартную библиотеку Arduino IDE "Servo", написал программный код в среде разработки Arduino IDE, который выполняет поставленную задачу.