Управление техническими системами
-
2020-06-18 21:02:15
Показано, что реализация принципа управления по прогнозу в автоматических системах регулирования технологических параметров энергетических объектов c типовыми алгоритмами позволяет существенно повысить качество регулирования и вместе с тем более полно использовать возможности, предоставляемые микропроцессорной техникой.

-
2020-06-17 12:46:26
Несмотря на постоянное развитие положений теории управления, до настоящего времени остается актуальной проблема повышения эффективности управления распределенными динамическими системами. Основа решения этой проблемы – комплексное совершенствование организации основных этапов типового цикла управления.

-
2020-06-15 13:04:20Обзор методов нейроуправления Нейроуправление динамическими объектами является новым перспективным направлением, находящимся на стыке таких дисц
-
2020-06-15 12:57:29
Искусственные нейронные сети (ИНС) – математические модели, а также их программные или аппаратные реализации, построенные по принципу организации и функционирования биологических нейронных сетей – сетей нервных клеток живого организма. Это понятие возникло при изучении процессов, протекающих в мозге, и при попытке смоделировать эти процессы. Первой такой попыткой были нейронные сети Уоррена Мак Каллока и Уолтера Питтса.
-
2020-06-14 16:02:08
В этой работе на очень неформальном уровне излагаются основы построения ПИДрегуляторов – одной из основных компонент автоматики и робототехники. ПИДрегулятор – это то, что изучается в курсе Теории автоматического управления, и различного рода монографий, учебников, статей имеется великое множество. Однако специфика современной робототехники заключается в том, что в нее порой приходят люди, далекие от классического робототехнического образования. Если для «настоящего» робототехника Теория автоматического регулирования управления – это одна из основных дисциплин, то для тех, кто «приходит со стороны», изучение принципов работы автоматических устройств представляет определенные трудности. Настоящая работа представляет собой очередную попытку неформального, популярного описания основ построения ПИД-регулятора, причем с уклоном в робототехнику, если под этим уклоном понимать иллюстрацию теории на примере движения мобильного робота
-
2020-06-14 15:30:14
Системы автоматического управления (САУ) предназначены для автоматического изменения одного или нескольких параметров объекта управления с целью установления требуемого режима его работы. САУ обеспечивает поддержание постоянства заданных значений регулируемых параметров или их изменение по заданному закону либо оптимизирует определенные критерии качества управления.
-
2020-06-14 12:50:01
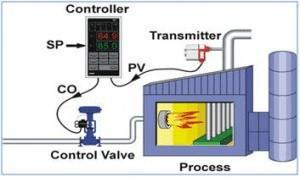
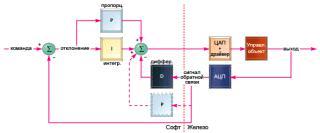
ПИД-регуляторы находятся в широком диапазоне применений для управления промышленными процессами. Приблизительно 95% операций с замкнутым контуром в промышленной автоматизации используют ПИД-регуляторы. PID обозначает Пропорционально-интегральная-диференциальная составляющая. Эти три контроллера объединены таким образом, что он создает управляющий сигнал.
-
2020-06-14 07:39:01
Одним из важных направлений развития современной промышленности является создание автоматизированных производств, построенных на базе робототехнических систем. Задача автоматизации наиболее актуальна для технологических операций обработки деталей сложной конфигурации, в частности гидроабразивной резки гибких композитных материалов. Для эффективного решения задач автоматизации процессов обработки важная роль отводится промышленным работам (ПР). Одним из важнейших вопросов при автоматизации операций обработки является обеспечение требуемого качества обработки заготовки. В процессе механической обработки все звенья системы «робот – инструмент – деталь» (РИД) подвергаются воздействию силы резания, упругим колебаниям звеньев ПР, а также деформациям обрабатываемой поверхности, что приводит к колебаниям системы в общем. Наибольший вклад в колебания системы вносят упругие колебания манипулятора ПР, что связано с его большой податливостью. Упругие колебания отрицательно сказываются на работе робототехнического комплекса, вызывая увеличение динамических нагрузок на элементы, снижение быстродействия и точности при отработке программных траекторий, появление незатухающих вибраций, опасных резонансных явлений и т.п. Таким образом, для достижения требуемого качества обработки с точки зрения конструкции манипулятора ПР требуется решение задачи компенсации упругих деформаций манипулятора, возникающих под воздействием силы резания.
-
2020-06-14 07:29:17
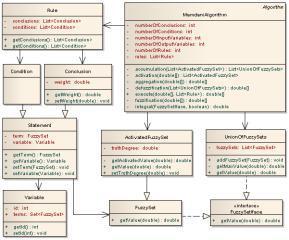
Так уж повелось, что любую статью о нечеткой логике принято начинать с упоминания имени Лотфи Заде. И я не стану исключением. Дело в том, что этот человек стал не только отцом-основателем целой научной теории, написав в 1965 году фундаментальный труд «Fuzzy Sets», но и проработал различные возможности ее практического применения. Он описал свой подход в 1973 году в тексте «Outline of a New Approach to the Analysis of Complex Systems and Decision Processes» (опубликованном в журнале IEEE Transactions on Systems). Примечательно, что сразу после его выхода одна предприимчивая датская фирма весьма успешно применила изложенные в нем принципы для усовершенствования своей системы управления сложным производственным процессом. Но при всех заслугах Л. Заде, не менее важный вклад внесли последователи этой теории. Например, английский математик Э. Мамдани (Ebrahim Mamdani). В 1975 году он разработал алгоритм, который был предложен в качестве метода для управления паровым двигателем. Предложенный им алгоритм, основанный на нечетком логическом выводе, позволил избежать чрезмерно большого объема вычислений и был по достоинству оценен специалистами. Этот алгоритм в настоящее время получил наибольшее практическое применение в задачах нечеткого моделирования.
-
2020-06-14 07:29:17
В работе синтезируется и моделируется гибридная система управления с адаптивной прогнозирующей моделью (англ. Model Predictive Control – MPC) для нестационарной модели вертикального движения плазмы в токамаке Т-15 [1]. Непрерывная модель объекта управления представляется последовательным соединением модели многофазного тиристорного выпрямителя, катушки горизонтального магнитного поля и плазмы в токамаке, неустойчивой по вертикальной координате. Синтезирован наблюдатель, оценивающий нестационарные параметры модели плазмы по ее входу и выходу с помощью градиентного метода. Непрерывная оценка параметра используется в дискретном адаптивном алгоритме управления прогнозирующей модели. Нестационарный прогнозирующий регулятор показал лучшее качество переходных процессов по сравнению с ПИДрегулятором.

-
2020-06-14 07:14:31
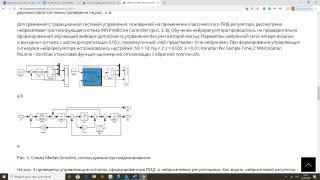
Как правило, в современной промышленности на любом этапе производственного процесса существует высокий уровень автоматизации. При этом технологические процессы и установки, встречающиеся в промышленности, являются нестационарными объектами управления, параметры которых могут изменяться в ходе технологического процесса. С целью повысить эффективность систем автоматического управления нестационарными объектами управления исследователи по всему миру проводят исследования, пытаясь объединить стандартный ПИД-регулятор с нечетким адаптивным контроллером. Наиболее часто настройка нечеткого регулятора производится на базе контроллера Мамдани. Кроме того, в последнее время для управления нестационарными объектами управления нашли широкое применение регуляторы на базе прогнозирующих моделей (Model Predictive Control). Данная статья посвящена сравнению систем автоматического управления нестационарным динамическим объектом на базе МРС-регулятора и ПИДрегулятора с нечеткой логикой. В ходе исследований производилось изменение параметров объекта управления и подавались возмущающие воздействия определенной амплитуды и длительности. В результате были получены переходные процессы, для которых были определены показатели качества. Сопоставление и анализ полученных результатов позволили сделать заключение о преимуществах одного регулятора перед другим

-
2020-06-13 22:06:15
Как правило, в современной промышленности на любом этапе производственного процесса существует высокий уровень автоматизации. При этом технологические процессы и установки, встречающиеся в промышленности, являются нестационарными объектами управления, параметры которых могут изменяться в ходе технологического процесса. С целью повысить эффективность систем автоматического управления нестационарными объектами управления исследователи по всему миру проводят исследования, пытаясь объединить стандартный ПИД-регулятор с нечетким адаптивным контроллером. Наиболее часто настройка нечеткого регулятора производится на базе контроллера Мамдани. Кроме того, в последнее время для управления нестационарными объектами управления нашли широкое применение регуляторы на базе прогнозирующих моделей (Model Predictive Control). Данная статья посвящена сравнению систем автоматического управления нестационарным динамическим объектом на базе МРС-регулятора и ПИД-регулятора с нечеткой логикой. В ходе исследований производилось изменение параметров объекта управления и подавались возмущающие воздействия определенной амплитуды и длительности. В результате были получены переходные процессы, для которых были определены показатели качества. Сопоставление и анализ полученных результатов позволили сделать заключение о преимуществах одного регулятора перед другим.

-
2020-05-17 11:59:12
При решении ряда сложных манипуляционных задач целесообразно принимать во внимание нелинейную динамику объекта управления. К таким задачам, в частности, можно отнести управление крупными манипуляторами космического базирования, а также наземными манипуляционными системами, применяемыми в строительстве, при ликвидации последствий аварий и катастроф. Для подобных манипуляционных систем задача управления усложняется за счет того, что динамики управляемой конструкции весьма сложна и, в большинстве случаев, не может быть полностью математически описана. В связи с этим не всегда могут быть применены методы, основанные на решении обратной задачи динамики. Применение PID- контроллеров, которые широко используются в большинстве промышленных приложений, также не позволяет принять во внимание особенности динамики движения таких систем. Также возникают проблемы с обеспечением устойчивости, в том числе, при действии внешних факторов, которые заранее не известны.
-
2020-05-17 09:35:57
перевод статьи "PID Without a PhD"
-
2020-05-17 09:28:57
Учебное пособие предназначено для первоначального знакомства с тематикой курса «Теория автоматического управления» (или «Теория автоматического регулирования»). Рассматриваются фундаментальные идеи этого курса на уровне общих понятий. Особое внимание уделяется не строгости изложения, а объяснению основных принципов.
Пособие может быть полезно для всех студентов, которые изучают теорию автоматического регулирования и чувствуют сложности при чтении серьезной литературы.
Выходные данные: Поляков К.Ю. Основы теории автоматического управления: учеб. пособие. — СПб.: Изд-во СПбГМТУ, 2012. — 234 с. ISBN 978-5-88303-560-8.
-
2020-05-17 09:07:35
Обещал я недавно моему знакомому — хорошему электрику и чайнику в электронике — сделать небольшое устройство в автомобиль, которое, регулируя заслонку, будет поддерживать обороты в дОлжном состоянии (все подробности по авто-части к нему. Знаю, что назвали мы эту чучу умным словом «регулятор холостого хода»). Причем эти обороты должны зависеть от текущей температуры двигателя. «Так тебе нужно работать с ПИД-регулятором» — сказал я ему. А в ответ увидел туман в глазах, дым в ушах и дрожащий голос – «А это ничего общего со СПИДом не имеет???». В общем, придется ему объяснить подробности, при этом избегая математики. В Интернете море статей на эту тему (достаточно начать отсюда). Моя статья – еще одна ложка в море информации. Интересующимся – под кат!